 FRoGGeR
FRoGGeR
Fast Robust Grasp Generation via the Min‑Weight Metric
Albert H. Li, Preston Culbertson, Joel W. Burdick, Aaron D. Ames
Caltech



Overview
We propose a differentiable, analytic grasp metric that enables collision-free grasp synthesis for dexterous hands in seconds (vs. minutes for existing methods). Our grasp metric is a relaxation of the feasibility LP traditionally used to check if a grasp is in “force closure:”
\[\begin{aligned} \ell^*(q) = \max_{\alpha \in \mathbb{R}^m, \; \ell \in \mathbb{R}} & \quad \ell \\ \text{s.t.} & \quad W(q) \alpha = 0\\ & \quad \mathbf{1}^T \alpha = 1 \\ & \quad \alpha \geq \ell \mathbf{1} \end{aligned}\]We show empirically that optimizing our metric yields robust grasps and it is well-correlated with existing metrics.
Using results from differentiable optimization, we can compute gradients of our metric \(\ell^*(q)\) with respect to the hand configuration \(q\) in fractions of a millisecond. This allows us to quickly generate diverse, collision-free grasps using nonlinear programming.
Our method for grasp generation, FRoGGeR, can be used to quickly post-process grasps generated from both simple heuristics and learning-based generative models, and has exciting applications for both real-time grasp planning and for generating grasp data at scale for training learning-based models.
Results
Grasp Optimzation
We study FRoGGeR’s performance on over 40 objects drawn from the YCB dataset, outperforming a competitive baseline in computation time, feasibility rate of grasp synthesis, and picking success in simulation. We conclude that FRoGGeR is fast: it has a median synthesis time of 0.834s over hundreds of experiments.
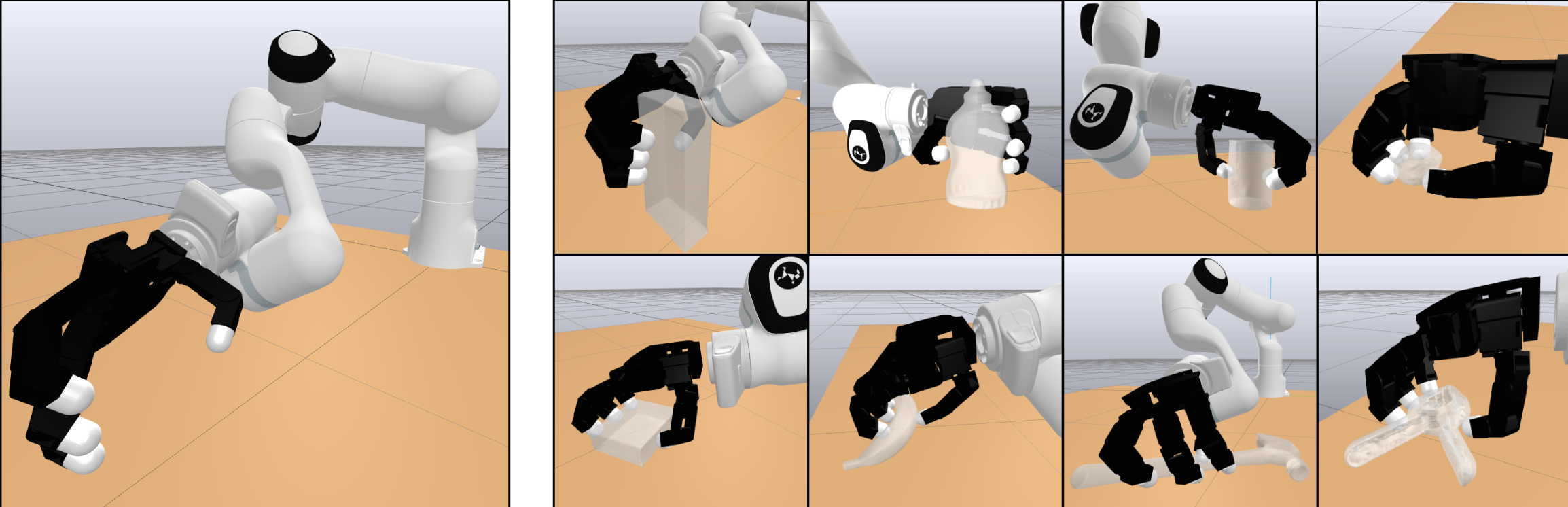
Representative grasps generated by FRoGGeR. We find our method is able to very quickly generate grasps that are diverse and robust to perturbations, for a wide variety of object geometries.
Comparison with Ferrari-Canny
We also study how our proposed metric \(\ell^*(q)\) correlates with existing metrics for grasp quality. We find that our metric is well-correlated with the traditional \(\epsilon\)-ball (or “Ferrari-Canny”) grasp metric, a standard robustness measure for dexterous grasping.
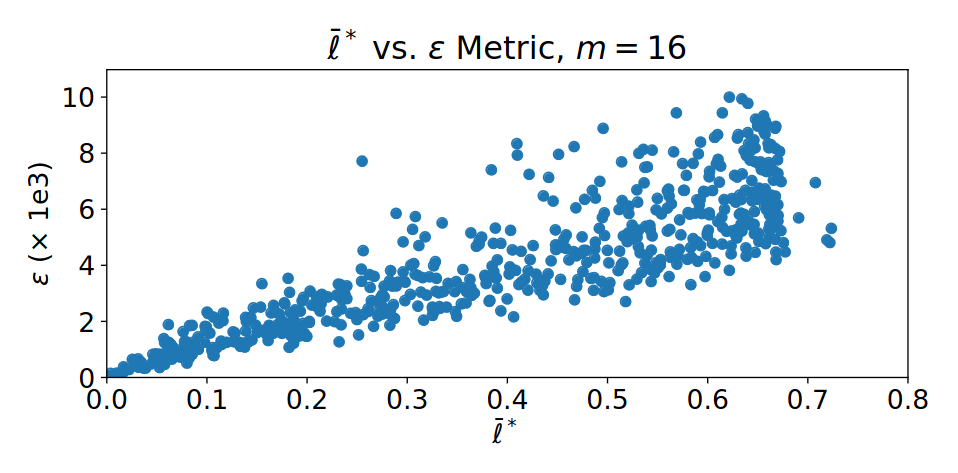
Scatter plot of Ferrari-Canny metric values \(\epsilon\) versus our proposed metric \(\ell^*\). We find the metrics are strongly correlated, especially at low values (where predicting force closure is especially important).
Citing
If you find this work useful in your research, please cite:
@article{
li2023_frogger,
title={FRoGGeR: Fast Robust Grasp Generation via the Min-Weight Metric},
author={Albert H. Li and Preston Culbertson and Joel W. Burdick and Aaron D. Ames},
journal={arxiv:2302.13687},
month={February},
year={2023},
}